Wendiges, effizientes Roboterbein nutzt künstliche Muskeln

In Kooperation der ETH Zürich und des Max-Planck-Instituts für Intelligente Systeme wurde das Bein für einen Laufroboter entwickelt, das sich grundlegend von der üblichen Form unterscheidet. Diese neue Art des Antriebs bietet zugleich weitere Funktionen, die im Alltag durchaus praktisch sein könnten.
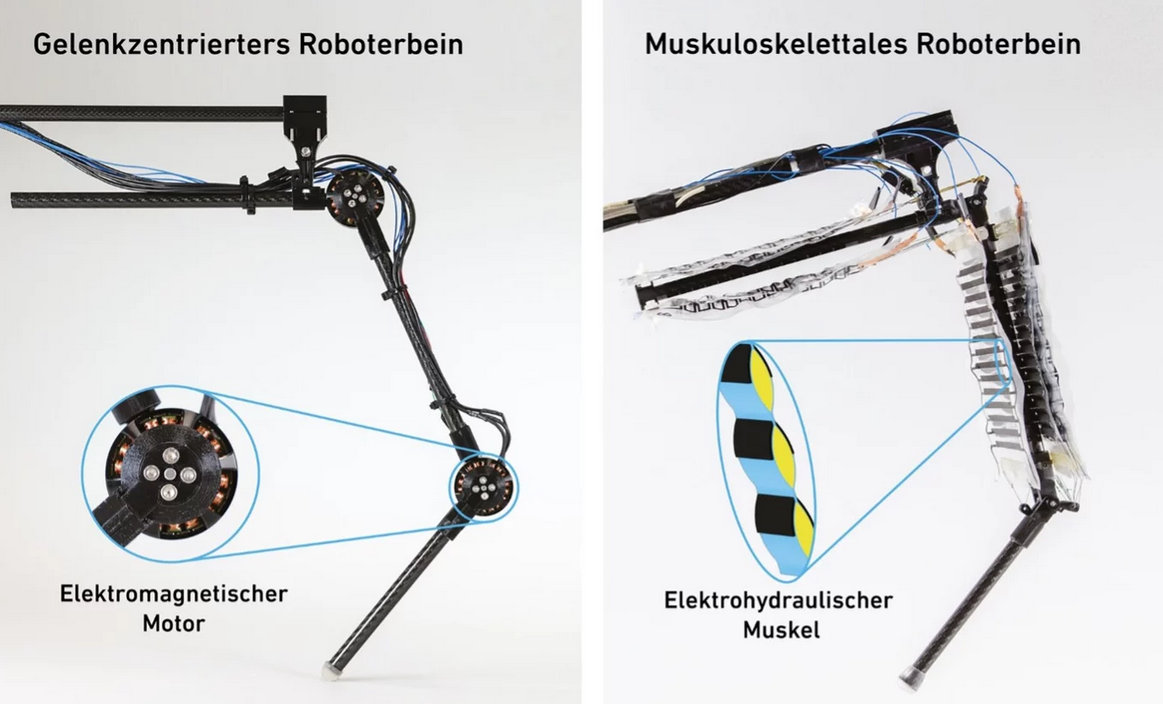
Statt eines Drehmotors mit Gleichstrom, der in den Gelenken sitzt, sind hier sogenannte "HASELs" mit zusätzlichen Sehnen am Skelett befestigt. Damit ähneln die elektrohydraulischen Aktuatoren viel eher der Muskulatur und können Bewegungen auf vergleichbare Weise ausführen.
Es handelt sich dabei um mit Öl angefüllte Beutel, die zusätzlich mit einem leitfähigen Material beschichtet sind. Eine angelegte Spannung zieht das Öl im Beutel auf eine Seite und verkürzt ihn dadurch. Klingt schon wieder nach Muskulatur.
Eine Reihe dieser Aktuatoren vorn und eine hinten kann somit das Bein strecken beziehungsweise einknicken. Die dafür benötigte Energie soll im Vergleich zu Drehstrommotoren vergleichsweise niedrig sein.
Bemerkenswerte Vorteile
Nicht nur sorgt die Technik dafür, dass das Roboterbein mühelos hüpfen und dabei scheinbar leichtfüßig Hindernisse überwinden kann. Dank der großflächigen Verteilung der elektrischen Spannung und des moderaten Energiebedarfs ist keine signifikante Erwärmung der elektrischen Bauteile feststellbar.
Weiterhin werden keine Sensoren benötigt, die dem Elektromotor mitteilen müssen, in welchen Winkel das Bein gerade gebeugt ist. Stattdessen interagiert der elektrohydraulische Antrieb adaptiv mit der Umgebung, beugt sich also so weit, wie der fehlende Widerstand es zulässt.
Ähnlich wird auch die Landung nach einem Sprung vollführt. Aus hoher oder niedriger Höhe, auf weichem oder harten Untergrund: Die künstliche Muskulatur mit den HASELs reagiert unmittelbar auf ihre Umwelt.
Aktuell handelt es sich aber noch um einen Prototyp, der nur ein einzelnes Gelenk antreibt. Von einem sich selbständig bewegenden Roboter ist das System noch weit entfernt.
Quelle(n)
