3D-Scanner auf Rädern - Hightech-Roboter für den Katastrophenschutz
Die Bewältigung von Katastrophenszenarien, sei es ein Unfall in einer Chemieanlage oder eine verheerende Überschwemmung, stellt Einsatzkräfte stets vor immense Herausforderungen. Ein schneller und präziser Überblick über die Lage ist dabei unerlässlich. Oftmals ist jedoch ein direktes Betreten des betroffenen Geländes mit erheblichen Risiken verbunden. Hier setzt das wegweisende Projekt "3D-InAus" des Fraunhofer-Instituts für Kommunikation, Informationsverarbeitung und Ergonomie FKIE in Wachtberg an und präsentiert eine zukunftsweisende Lösung.
Großer und extrem schneller 3D-Scanner:
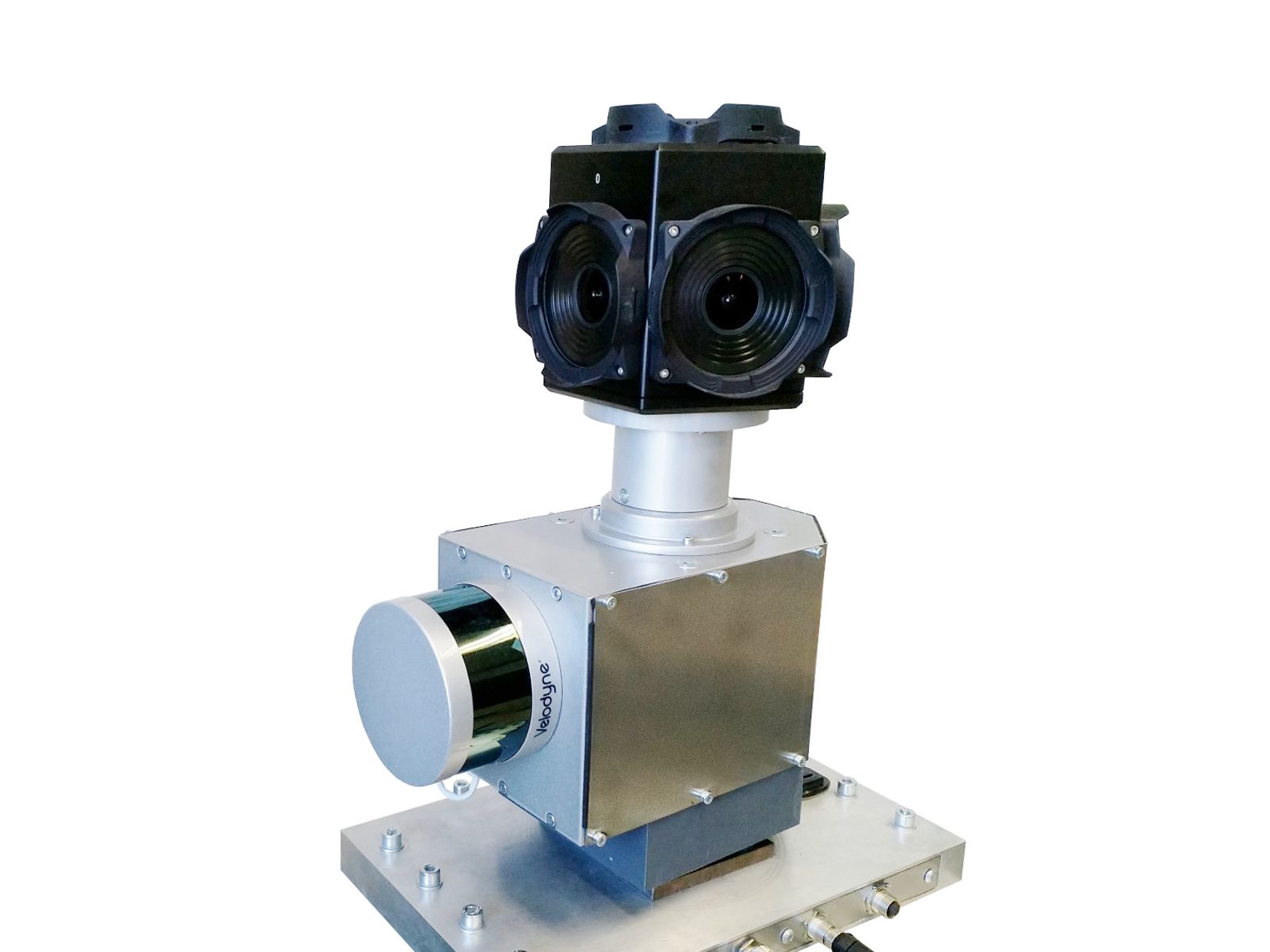
Im Zentrum dieser Innovation steht ein autonom agierendes Robotersystem, das mit modernster LiDAR-Technologie (Light Detection and Ranging) ausgestattet ist. LiDAR kann man sich als eine Art "Laser-Auge" vorstellen, welches die Umgebung mit Lichtimpulsen abtastet. Pro Sekunde werden 1,3 Millionen dieser Laserimpulse ausgesandt. Treffen diese auf ein Objekt, werden sie reflektiert. Anhand der gemessenen Zeitdifferenz zwischen Aussendung und Rückkehr des Impulses errechnet das System die exakte Entfernung zum jeweiligen Objekt. Ein rotierender Spiegel im LiDAR-Modul, kombiniert mit einem Drehteller, ermöglicht dabei eine lückenlose 360-Grad-Erfassung der Umgebung.
Das Ergebnis dieser Vermessungsaktion ist eine dreidimensionale Punktwolke, in der jeder Punkt einen reflektierten Laserimpuls und somit eine präzise Entfernungsmessung repräsentiert. Ergänzend dazu liefern bis zu sechs integrierte Kameras hochauflösende Bilder, die genutzt werden, um die Punktwolke farblich zu texturieren. Diese Fusion aus LiDAR-Daten und Kamerabildern erschafft ein detailreiches und vor allem geometrisch korrektes Abbild der Umgebung, inklusive aller Gebäude, Freiflächen und relevanter Objekte. Es entsteht ein großes 3D-Model der Umgebung
Die Verarbeitung der enormen Datenmengen geschieht teilweise bereits während der Erkundungsfahrt des Roboters. Die finale Visualisierung erfolgt im Postprocessing. Ein Gebiet von 400 × 400 Metern, was in etwa der Fläche von 22 Fußballfeldern entspricht, kann so innerhalb von circa drei Stunden vollständig erfasst werden. In zeitkritischen Situationen liefert das System bereits nach einer Stunde einen ersten, groben Überblick.
Der Roboter kann ferngesteuert werden oder autonom per GPS fahren. Selbst innerhalb von Gebäuden, wo GPS-Signale versagen, ermöglicht ein cleveres, auf der vorherigen Kartierung basierendes, virtuelles GPS die autonome Navigation des Roboters.
Ein besonderes Augenmerk wurde auf die Flexibilität des Systems gelegt. Das LiDAR-Modul und der Drehteller sind so konzipiert, dass sie auf unterschiedlichen Plattformen montiert werden können, von klassischen Rad- und Kettenfahrzeugen hin zu Drohnen. Je nach Beschaffenheit des Geländes und den spezifischen Anforderungen kann so die optimale Konfiguration gewählt werden. Weiterhin lässt sich das System um Sensoren erweitern, die etwa gasförmige Schadstoffe oder radioaktive Strahlung detektieren und diese Informationen in der 3D-Karte visualisieren können.

